


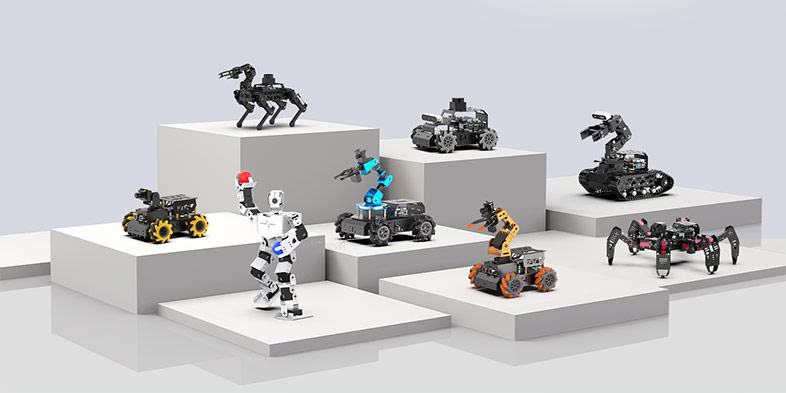











多模态复合机器人


建图导航,路径规划
ROSLander可以智能感知空间定位,自主规划行走路径,还能实现高精度的建图导航、多点导航、避障等。
3D视觉,自主搬运
运用RTAB SLAM算法,融合视觉及雷达数据,构建三维彩色地图,使得ROSLander可以在三维地图里导航避障。用户可以通过机械臂3D深度相机,获取深度图像数据,自行搭建部署仿真环境,实现过独木桥、自主搬运等玩法。


深度学习,实训演练
建立多场景的实训演练和测试实验平台,适应小空间场地需求。满足新手入门需求,可编程实现自动驾驶功能、SLAM建图、自主导航搬运与避障,自主倒车入库、车道保持、红绿灯识别等。
兼容ROS1/ROS2
ROSLander程序源码开源,全面兼容ROS1和ROS2。WonderNex机器人联合国内ROS社区教学开创者古月居,制作了ROS开发系统教程,还有相关的机器人硬件结构、仿真教学等内容,为用户提供了更全面的深度学习平台。


观看视频
.png?v=20240424)
观看视频

观看视频
