


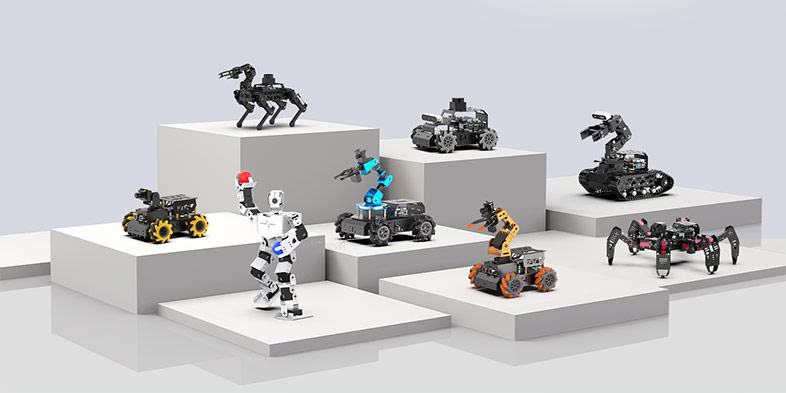











赛事产品
专为高校机器人赛事打造,支持国家级白名单竟赛,为SLAM导航算法、机器视觉、深度学习、机器人运动控制等二次开发提供快速便捷的集成方案
 中国机器人及人工智能大赛
中国机器人及人工智能大赛
 信息安全与对抗技术竞赛(ISCC)
信息安全与对抗技术竞赛(ISCC)
 睿抗机器人开发者大赛(RAICOM)
睿抗机器人开发者大赛(RAICOM)
 国际先进机器人及仿真技术大赛
国际先进机器人及仿真技术大赛

多模态ROS教育机器人
ROSLander
专业级SLAM开发平台,支持麦克纳姆轮/差速轮双模快速切换。集成Jetson Nano、激光雷达与机械臂,是SLAM建图导航、无人驾驶与机器视觉教学的理想载体。
- 高精度激光雷达 & 3D 深度相机
- 支持机器人视觉抓取与搬运场景
- 提供运动控制二次开发方案
人形机器人开发平台
ROSMan
拥有24自由度的全自研平台。内置逆运动学算法,可完成行走、攀爬、跨栏等高难度动作。结合AI视觉,实现自主踢球、投篮及上下台阶。
- 行走高度与转弯半径可调节
- 集成多模态AI大模型接口
- 弥补双足步态算法教学短板

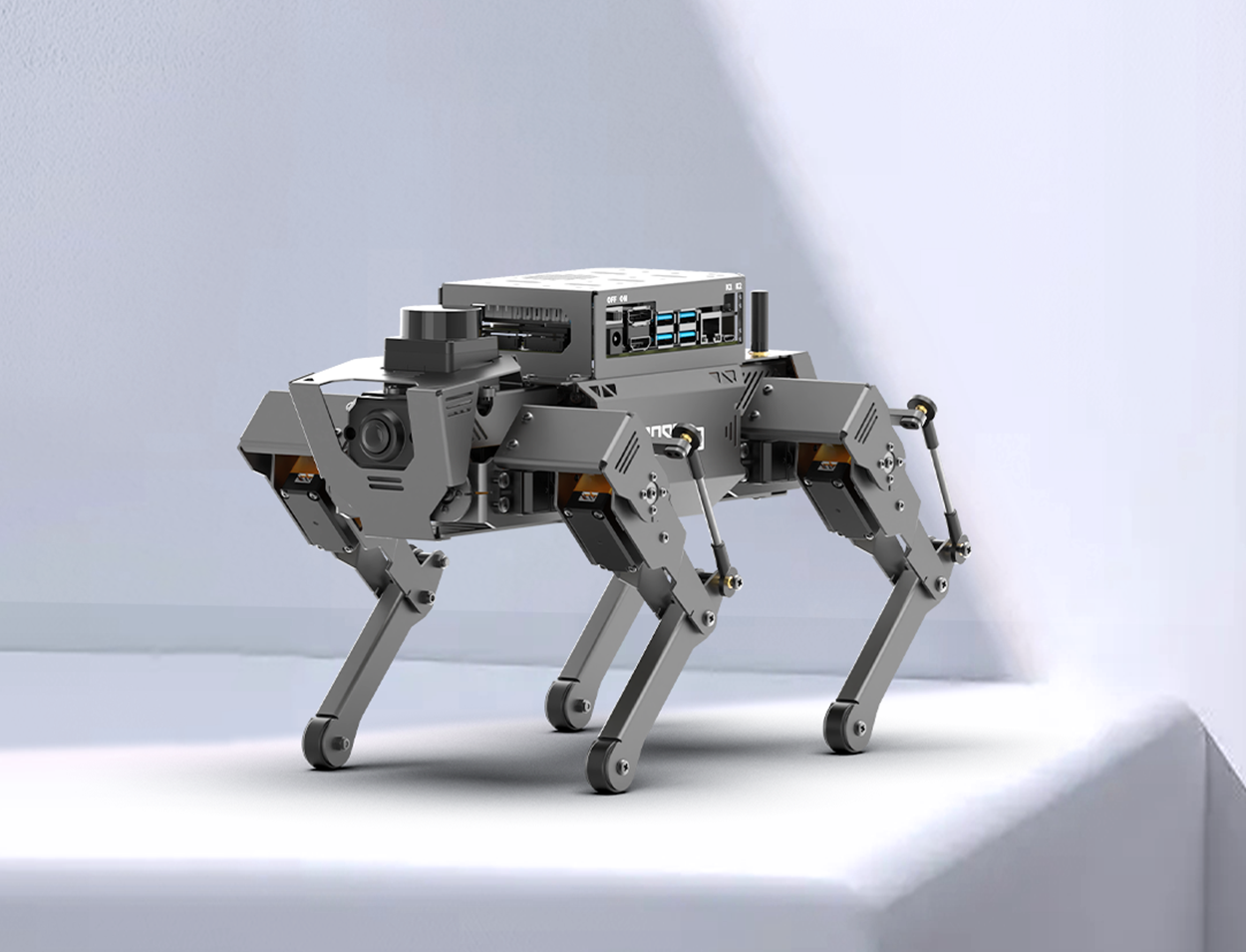
四足仿生机械狗
ROSPug
基于ROS系统打造,搭载12个高压强磁总线舵机。内置全自研动态平衡运动学算法,运行轻巧稳定。部署多模态AI大模型,满足四足运动学及具身智能交互的学习验证。
- NVIDIA Jetson Nano 主控制器
- 全自研逆运动学步态
- 适合路径规划深度学习二次开发
全地形六足机器人
ROSpider
六足底盘集成18个35KG高压总线舵机。通过对周围环境的勘测扫描,具有极强的灵活机动性和全地形适应性。是高性能边缘智能机器人的绝佳代表。
- 高级仿生运动学步态算法
- 物品识别追踪与体感交互
- 支持SLAM建图与语音导航


赛事合作与教学支持
我们为高校提供全面的机器人赛事支持方案,包括硬件设备、教学资料、ROS源码和技术培训,
助力高校培养更多人工智能与机器人领域人才,弥补国内相关技术领域研究的短板。 ROS源码提供
ROS源码提供
完整开源代码,便于二次开发与教学
 详细教学资料
详细教学资料
配套教程、实验指导与案例分析
 技术培训服务
技术培训服务
专业团队提供线上线下培训支持